MLAT CAT020 0.15 报文协议解析
简介/声明
多点定位(MLAT) 全称是 Multilateration,多点定位技术利用多个地面接收机接收到机载应答机信号的时间差,计算得出飞机位置。
解析文档均为欧洲航空交通管理官方提供。
参考资料
EuroControl:cat020p14ed15.pdf
解析数据
1
| 14 00 46 FF 0F 01 84 16 07 41 10 A1 A0 BB 00 57 8B 48 01 44 DC F6 00 17 06 00 1F AD 0E F2 02 78 10 45 80 0C 54 F2 DB 3C 60 00 02 20 40 19 98 D0 00 00 00 00 00 01 00 0C 00 0C 00 03 00 06 00 05 00 05 A1 A0 C2 00
|
数据格式
| CAT = 020 |
LEN |
FSPEC |
Items of the first record |
解析报文区域数据
| 16进制代码 |
解析值(二进制或十进制) |
备注 |
| 0x14 |
20 |
报文头,转换十进制为20 |
| 0x00 |
00 |
报文长度起始位 |
| 0x46 |
70 |
报文长度 LEN,为报文数据字节数,两个字节表示,该报文长度为0x00*256+0x46=0x46=70字节 |
| FF |
1111 1111 |
I020/010、I020/020、I020/140、I020/041、I020/042、I020/161、I020/170 |
| 0F |
0000 1111 |
I020/220、I020/245、I020/110 |
| 01 |
0000 0001 |
|
| 84 |
1000 0100 |
I020/230、RE |
| 16 |
22 |
|
| 07 |
7 |
I020/010 数据源的标识符 |
| 41 |
65 |
|
| 10 |
16 |
I020/020 目标报告描述符 |
| A1 |
161 |
|
| A0 |
160 |
|
| BB |
187 |
I020/140 日时间项 |
| 00 |
0 |
|
| 57 |
87 |
|
| 8B |
139 |
|
| 48 |
72 |
|
| 01 |
1 |
|
| 44 |
68 |
|
| DC |
220 |
|
| F6 |
246 |
I020/041 位置坐标(WGS-84)项 |
| 00 |
0 |
|
| 17 |
23 |
|
| 06 |
6 |
|
| 00 |
0 |
|
| 1F |
31 |
|
| AD |
173 |
I020/042 在笛卡尔坐标中的位置 |
| 0E |
14 |
|
| F2 |
242 |
I020/161 跟踪号码 |
| 02 |
2 |
I020/170 追踪发送状态 |
| 78 |
120 |
|
| 10 |
16 |
|
| 45 |
69 |
I020/220 目标地址 |
| 80 |
128 |
|
| 0C |
12 |
|
| 54 |
84 |
|
| F2 |
242 |
|
| DB |
219 |
|
| 3C |
60 |
|
| 60 |
96 |
I020/245 目标识别 航班号 |
| 00 |
0 |
|
| 02 |
2 |
I020/110 测量高度(笛卡尔坐标) |
| 20 |
32 |
|
| 40 |
64 |
I020/230 通讯/自动识别系统的能力和飞行状态 |
| 19 |
|
|
| 98 |
|
|
| D0 |
|
|
| 00 |
|
|
| 00 |
|
|
| 00 |
|
|
| 00 |
|
|
| 00 |
|
|
| 01 |
|
|
| 00 |
|
|
| 0C |
|
|
| 00 |
|
|
| 0C |
|
|
| 00 |
|
|
| 03 |
|
|
| 00 |
|
|
| 06 |
|
|
| 00 |
|
|
| 05 |
|
|
| 00 |
|
|
| 05 |
|
|
| A1 |
|
|
| A0 |
|
|
| C2 |
|
|
| 00 |
|
|
代码
I020/140
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
|
public static string I020_140(byte[] byteData)
{
string timeDec = (((uint)byteData[0] << 16) + ((uint)byteData[1] << 8) + byteData[2]).ToString();
long ms = (long)((double.Parse(timeDec) / 128) * 1000);
int ss = 1000;
int mi = ss * 60;
int hh = mi * 60;
long hour = ms / hh;
long minute = (ms - hour * hh) / mi;
long second = (ms - hour * hh - minute * mi) / ss;
long milliSecond = ms - hour * hh - minute * mi - second * ss;
string strHour = hour < 10 ? "0" + hour : "" + hour;
string strMinute = minute < 10 ? "0" + minute : "" + minute;
string strSecond = second < 10 ? "0" + second : "" + second;
string strMilliSecond = milliSecond < 10 ? "0" + milliSecond : "" + milliSecond;
strMilliSecond = milliSecond < 100 ? "0" + strMilliSecond : "" + strMilliSecond;
strHour = int.Parse(strHour) + 8 > 24 ? (int.Parse(strHour) + 8 - 24).ToString() : (int.Parse(strHour) + 8).ToString();
return $"{DateTime.Now.ToShortDateString()} {strHour}:{strMinute}:{strSecond}.{strMilliSecond}";
}
|
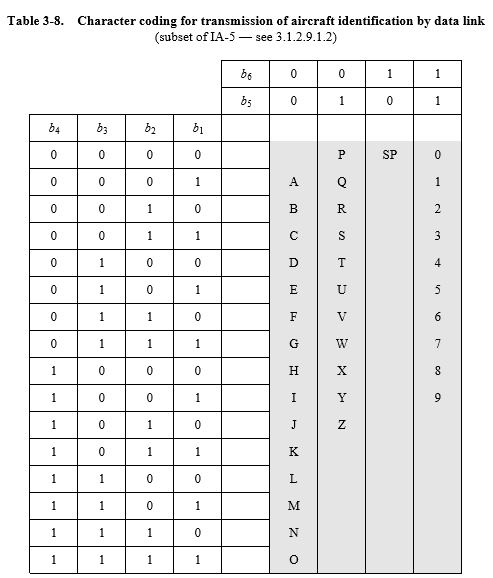
I020/245
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
public static string I020_245(byte[] byteData)
{
string str = "";
for (int i = 1; i < byteData.Length; i++)
{
str += Convert.ToString(byteData[i], 2).PadLeft(8, '0');
}
char[] strCharArray = str.ToCharArray();
string flno2BinaryStr = "";
string result = "";
for (int i = 0; i < strCharArray.Length; i++)
{
flno2BinaryStr += strCharArray[i] + "";
if ((i + 1) % 6 == 0)
{
string flightNumberValue = flightNumberMap[flno2BinaryStr];
if (!string.IsNullOrEmpty(flightNumberValue))
{
result += flightNumberValue;
}
flno2BinaryStr = "";
}
}
return result;
}
|
NOTE: See ICAO document Annex 10, Volume IV, section 3.1.2.9
for the coding rules.
每六字节代表一个字母或数字
I020/041
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
public static double[] I020_041(byte[] byteData)
{
double[] relDataArray = new double[2];
if (byteData.Length == 8)
{
string xCoordinate10 = byteData[0].ToString("X2") + byteData[1].ToString("X2") + byteData[2].ToString("X2") + byteData[3].ToString("X2");
string yCoordinate10 = byteData[4].ToString("X2") + byteData[5].ToString("X2") + byteData[6].ToString("X2") + byteData[7].ToString("X2");
relDataArray[0] = double.Parse(Convert.ToInt32(xCoordinate10, 16).ToString()) * 180 / Math.Pow(2, 25);
relDataArray[1] = double.Parse(Convert.ToInt32(yCoordinate10, 16).ToString()) * 180 / Math.Pow(2, 25);
return relDataArray;
}
return null;
}
|
I020/042
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
public static double[] I020_042(byte[] byteData)
{
double[] relDataArray = new double[2];
if (byteData.Length == 6)
{
string xAngle16 = byteData[0].ToString("X2") + byteData[1].ToString("X2") + byteData[2].ToString("X2");
string yAngle16 = byteData[3].ToString("X2") + byteData[4].ToString("X2") + byteData[5].ToString("X2");
string xAngle10 = Convert.ToInt32(xAngle16, 16).ToString();
string yAngle10 = Convert.ToInt32(yAngle16, 16).ToString();
relDataArray[0] = double.Parse(xAngle10) * 0.5;
relDataArray[1] = double.Parse(yAngle10) * 0.5;
return relDataArray;
}
return null;
}
|
I020/161
1
2
3
4
5
6
7
8
9
|
public static int I020_161(byte[] byteData)
{
return Convert.ToInt32(byteData[0].ToString("X2") + byteData[1].ToString("X2"), 16);
}
|
I020/110
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
|
public static double I020_110(byte[] byteData)
{
string strByteData = byteData[0].ToString("X2") + byteData[1].ToString("X2");
double dByteData = Convert.ToInt32(strByteData, 16);
if (Convert.ToString(byteData[0], 2).Substring(0, 1).Equals("1"))
{
return -(Math.Pow(2, 16) - dByteData) * 6.25;
}
else
{
return dByteData * 6.25;
}
}
|